|
|
|
|
|
Produkt - Preise / Bestellungen hier
Seite als 
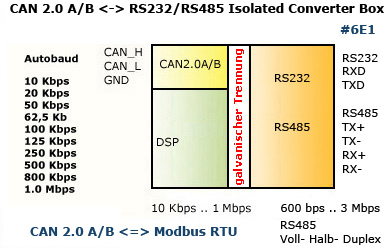
CAN2.0 <=> Modbus RTU RS232 & RS485 High Speed Isolated Converter (Prod. Nr. #6E1)
für red-y Sensor (mit Modbus RTU Anschluss) von Vögtlin !
Merkmale:
Extrem klein ! Außenabmessungen (mm) L 83 B 42 H 21 !
CAN 2.0A/B - Seitig: 10 Kbps ... 1 Mbps
RS485 - Seitig: 600 bps ... 3 Mbps
RS485 - Seitig: 600 bps ... 1 Mbps
Mit galvanischer Trennung !
2500 VAC rms t=1 min. per UL1577
Viorm = 560 Vpeak
CAN 2.0A/B:
High speed vollisolierter CAN 2.0A & 2.0B Bus
Slope-Control Mode to Reduce EMI
Thermal Shutdown, Current Limiting
ISO 11898 Standard, CAN 2.0A & 2.0B
RS485 Receiver:
+/- 15 kV Human Body Model
+/- 6 kV IEC 1000-4-2, Contact Discharge
+/- 12 kV IEC 1000-4-2, Air-Gap Discharge
Allow Up to 128 Receivers on the Bus
True-Fail-Safe Receiver
-7V .. +12V Common-Mode Range
Thermal Protection Against Output Short Circuit
RS485 Driver:
+/- 9 kV Human Body Model
Slev-Rate Limited for Errorless Data Transmission
-7V .. +12V Common-Mode Range
Current Limiting
Thermal Shutdown for Driver-Overload Protection
RS232:
±15 kV Human Body Model
±8 kV IEC 1000-4-2, Contact Discharge
±15 kV IEC 1000-4-2, Air-Gap Discharge
Latchup Free
1 Mbps Data Rate
EIA/TIA-232 Specifications Down to 3.0 V
Elektronik mit Urethan versiegelt!
|
|
Blockschaltbild
Konverter Bilder
Technische Daten CAN - Modbus RTU RS232/RS485 Adapter
| Produkt:
|
CAN2.0 <=> Modbus RTU RS232 & RS485
High Speed Isolated Converter
|
#6E1
|
Konverter Doku
V4.4 ASCII 110
|
Version V4.4 PDF Format
|
|
| Anschluss 1:
|
CAN 2.0A/B:
High speed vollisolierter CAN 2.0A & 2.0B Bus
Slope-Control Mode to Reduce EMI
Thermal Shutdown, Current Limiting
ISO 11898 Standard, CAN 2.0A & 2.0B
|
|
| Anschluss 1 Belegung:
|
Sub-D Stecker 9 pol. nach CiA DS102-1
Pin
1 - PowerIn +7,5 ... 16V DC
2 - CAN_L
3 - GND
4 - nc
5 - nc
6 - GND
7 - CAN_H
8 - nc
9 - PowerIn +7,5 ... 16V DC
Pin 1 ist intern mit Pin 9 verbunden
Pin 3 ist intern mit Pin 6 verbunden
|
|
| Abschlusswiderstände:
|
120 R - zwischen CAN_L und CAN_H (intern)
|
|
Unterstützte Übertragungsraten:
CAN 2.0 A/B Seitig
|
10 Kbps
20 Kbps
50 Kbps
62,5 Kbps
100 Kbps
125 Kbps
250 Kbps
500 Kbps
800 Kbps
1.0 Mbps
oder
Autobaud
|
|
| Anschluss 2:
|
RS232:
±15 kV Human Body Model
±8 kV IEC 1000-4-2, Contact Discharge
±15 kV IEC 1000-4-2, Air-Gap Discharge
Latchup Free
1 Mbps Data Rate
EIA/TIA-232 Specifications Down to 3.0 V
RS485 Receiver:
+/- 15 kV Human Body Model
+/- 6 kV IEC 1000-4-2, Contact Discharge
+/- 12 kV IEC 1000-4-2, Air-Gap Discharge
Allow Up to 128 Receivers on the Bus
True-Fail-Safe Receiver
-7V .. +12V Common-Mode Range
Thermal Protection Against Output Short Circuit
RS485 Driver:
+/- 9 kV Human Body Model
Slev-Rate Limited for Errorless Data Transmission
-7V .. +12V Common-Mode Range
Current Limiting
Thermal Shutdown for Driver-Overload Protection
|
|
| Anschluss 2 Belegung:
|
Sub-D 9 pol. Buchse
Pin
RS485
1 - TX- (Out)
2 - TX+ (Out)
3 - RX+ (In)
4 - RX- (In)
5 - GND
Zwischen RX- und RX+ befindet sich ein Abschlusswiderstand von 120 R
RS232
6 - nc
7 - RXD (In)
8 - TXD (Out)
9 - nc
Anschluss an red-Y Sensor:
4N-GX Konverter Pin <=> Red-y Sensor Pin
TX- Output - 1 <=> RX- Input- 8
TX+ Output+ 2 <=> RX+ Input+ 9
RX+ Input+ 3 <=> TX+ Output+ 6
RX- Input- 4 <=> TX- Output- 7
GND_Iso 5 <=> GND 1 & 2
Nur an red-y Sensor Sub-D ! +24V DC red-y Sensor Spannungsversorgung 3
|
|
Unterstützte Übertragungsraten:
RS232 & RS485
|
600 bps (alle 8 E 1 (8N2))
1200 bps
2400 bps
4800 bps
9600 bps
19200 bps
38400 bps
57600 bps
115200 bps
230000 bps
500000 bps
600000 bps
750000 bps
1000000 bps
1500000 bps
3000000 bps
RS232 bis 1 Mbps, RS485 bis 3 Mbps
Andere Baudraten auf Anfrage.
|
|
| Galvanische Trennung:
|
2500 Vrms 1 Min.
Viorm=560Vpeak
Elektronik Modul mit Urethan versiegelt
|
|
| Spannungsversorgung:
|
6,8 .. 16V DC über CAN Stecker
|
|
| Zustandsanzeigen:
|
Power: Run LED
CAN 2.0A/B: TX/RX LED + Buffer Overflow LED
RS232/RS485: TX/RX LED + Buffer Overflow LED
|
|
| Betriebstemperatur:
|
-5..+70°C
|
|
| Außenabmessungen:
|
L 83 B 42 H 21 (mm) Plastikgehäuse Material: ABS-94HB
|
|
|
Kurzbeschreibung
Der Konverter erlaubt den Anschluss von red-y Sensor mit Modbus Schnittstelle an ein CAN A/B Bus.
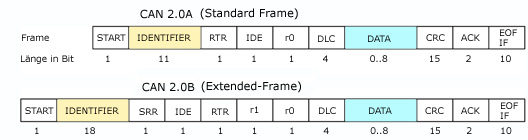
Der Konverter unterstützt 11- und 29-Bit-Identifier (CAN 2.0A/2.0B) und Baudraten von
10 Kbps bis 1 Mbps. Die CAN Baudrate kann auch automatisch von dem Konverter erkannt werden
- Autobaud.
Die CAN Nachrichten sind sehr einfach aufgebaut und erlauben das Auslesen und Beschreiben von
red-y Sensor Register. Die Übersetzung von CAN Telegrammen in Modbus Nachrichten erfolgt automatisch.
Mehr Informationen finden Sie in der Doku.
Konverter Doku V4.4 PDF Format
CAN 2.0A/B Konverter mit kundenspezifische Software sind auf Anfrage erhältlich.
|
|
Modbus RTU Info
Modbus RTU (RTU: Remote Terminal Unit, entfernte Terminaleinheit) überträgt die Daten
in binärer Form. Dies sorgt für einen guten Datendurchsatz, allerdings können die Daten
nicht direkt vom Menschen ausgewertet werden, sondern müssen zuvor in ein lesbares Format
umgesetzt werden.
Protokollaufbau
Im RTU-Modus wird der Sendebeginn durch eine Sendepause von mindestens drei Zeichen Länge
markiert. Die Länge der Sendepause hängt somit von der Übertragungsgeschwindigkeit ab.
Das Adressfeld besteht aus acht Bit, die die Empfängeradresse darstellen. Der Slave sendet
bei seiner Antwort an den Master eben diese Adresse zurück, damit der Master die Antwort
zuordnen kann. Das Funktionsfeld besteht aus 8 Bit. Hat der Slave die Anfrage des Masters
korrekt empfangen, so antwortet er mit demselben Funktionscode. Ist ein Fehler aufgetreten,
so verändert er den Funktionscode, indem er das höchstwertige Bit des Funktionsfeldes
auf 1 setzt. Das Datenfeld enthält Hinweise, welche Register der Slave auslesen soll,
und ab welcher Adresse diese beginnen. Der Slave setzt dort die ausgelesenen Daten
(z. B. Messwerte) ein, um sie an den Master zu senden. Im Fehlerfall wird dort ein Fehlercode
übertragen. Das Feld für die Prüfsumme, die mittels CRC ermittelt wird, beträgt 16 Bit.
Das Ende der Nachricht wird durch eine Sendepause von mindestens 1,5 Zeichen Länge markiert.
Start ------------------------- Adresse - Funktion - Daten -- CR-Check - Ende
Wartezeit (min. 3,5 Zeichen) -- 1 Byte -- 1 Byte -- n Byte -- 2 Byte --- Wartezeit (min 1,5 Zeichen)
CAN-Info
Feldbussystem
Ein Datennetzwerk auf der industriellen Feldebene. An diesem Netzwerk können über Interfaces
verschiedene I/O Module, Sensoren, Regler, usw. mit einem Industrie PC verbunden werden.
Für die Verbindung aller Teilnehmer wird nur eine Leitung oder Kabel benötigt.
Durch ein Feldbussystem werden Installationskosten eingespart.
Ein weiterer Vorteil eines Feldbussystems ist, dass es ständig ausgebaut und erweitert
werden kann.
CAN-Feldbussystem
CAN steht für Controller- Area- Network.
CAN wurde von Bosch für die fahrzeuginterne Kommunikation entwickelt.
Merkmale vom CAN Feldbus:
- Datenrate von 1 MBaud bei einer Netzausdehnung bis zu 50 m
- Beidseitig abgeschlossenes Netzwerk.
- Busmedium ist Twisted-Pair-Kabel.
- Nachrichtenorientiertes Protokoll. Die Nachricht wird mit einer Nachrichtenkennung
(Identifier) gekennzeichnet. Alle Netzknoten prüfen anhand des Identifiers, ob die
Nachricht für sie relevant ist.
- Broadcasting, Multicasting. Alle Netzknoten erhalten gleichzeitig jede Nachricht.
Daher ist eine Synchronisation möglich.
- Echtzeitfähigkeit. Definierte max. Wartezeit für Nachrichten hoher Priorität.
- Priorisierung von Nachrichten. Der Identifier setzt die Priorität der Nachricht fest.
Dadurch können wichtige Nachrichten schnell über den Bus übertragen werden.
- Multi-Master-System. Jeder Busteilnehmer kann seine Nachricht beginnen, wenn
der Bus nicht belegt ist. Bei einem gleichzeitigen Senden von Nachrichten setzt sich
der Teilnehmer mit der höchsten Priorität durch.
- Einfache Kommunikationsdienste. Mit dem CAN-Bus kann man lediglich Nachrichten senden
und Nachrichten anfordern.
- Kurze Blocklänge. Die Datenlänge einer CAN-Nachricht beträgt 8 Byte.
- Datenübertragung mit kurzer Fehlererholzeit. Durch mehre Fehlererkennungsmechanismen,
werden verfälschte Nachrichten mit großer Wahrscheinlichkeit erkannt.
Wird ein Fehler erkannt, so wird die Nachrichtensendung automatisch wiederholt.
- Sicherstellung netzweiter Datenkonsistenz. Gestörte Nachrichten werden als fehlerhaft gekennzeichnet.
- Lokalisation fehlerhafter oder ausgefallener Stationen. Das CAN-Protokoll beinhaltet eine
Funktionsüberwachung von Netzknoten. Netzknoten, die fehlerhaft sind, werden in ihrer Funktion
eingeschränkt oder ganz vom Netzwerk abgekoppelt.
- Buszugriff nach dem CSMA/CA Verfahren.
- unbegrenzte Anzahl von Teilnehmern an einem Bus (theoretisch), bis zu 64 (praktisch).
Fehler in der Busverkabelung z.B.:
- fehlerhafte Busabschlüsse
- nicht ausreichende Sendepegel
- hohe Übergangswiderstände infolge Alterung/Korrosion
- unzureichende Signalgüte, zu lange Stichleitung
- Verwendung falscher Leitungen
- ungünstige Leitungsführung, Störung durch starke Felder
CAN-Bus nach ISO 11898 (High-Speed)
- mit 11 oder 29 Bit Identifier (CAN 2.0A und 2.0B)
- Baudraten 10k, 20k, 50k, 62.5k, 125k, 250k, 500k, 800k, 1000k
- Baudratenerkennung alle Baudraten, + 5k und 100k
Verhältnis von Bus Speed zu Kabellänge
Bus Speed (kbps)
|
Kabel Typ
|
Kabel R/m
|
Abschlußwiderstand
|
Bus Kabellänge
|
50
|
0,75..0,8 mm2 AWG18
|
70 mOhm
|
150..300 Ohm
|
600..1000 m
|
100
|
0,5..0,6 mm2 AWG20
|
<60 mOhm
|
150..300 Ohm
|
300..600 m
|
500
|
0,34..0,6 mm2 AWG22, AWG20
|
<40 mOhm
|
127 Ohm
|
40..300 m
|
1000
|
0,25..0,34 mm2 AWG23, AWG22
|
<26 mOhm
|
124 Ohm
|
0..40 m
|
|
|
|
|
|
|
|
|
|
|
4N-GALAXY -
copyright © 1996-2018 4N-GALAXY.DE - last update 11.11.2006
|
|
|
|
|
|
)
)